Was ist ein CAN-Bus?
Der CAN-Bus (Controller Area Network) ist ein serielles Bussystem, das in den 1980er-Jahren von Bosch entwickelt wurde. Er ermöglicht die Kommunikation zwischen mehreren Steuergeräten (ECUs) ohne einen zentralen Rechner. Ursprünglich für die Automobilindustrie konzipiert, ist CAN heute in vielen Bereichen Standard.
Funktionsweise
Der CAN-Bus arbeitet nach dem Multi-Master-Prinzip: Jeder Teilnehmer kann Nachrichten senden, und alle anderen empfangen sie gleichzeitig. Nachrichten werden über eine priorisierte Arbitrierung verwaltet – das Steuergerät mit der höchsten Priorität erhält im Konfliktfall den Buszugriff.
Wichtige Eigenschaften:
- Zwei-Draht-Leitung: CAN-High und CAN-Low für differentielle Signalübertragung
- Geschwindigkeiten: Bis zu 1 Mbit/s (CAN 2.0) oder 5 Mbit/s (CAN FD)
- Fehlererkennung: Integrierte Mechanismen wie CRC-Prüfung und Bit-Monitoring
- Echtzeitfähig: Deterministische Nachrichtenübertragung für zeitkritische Anwendungen
Einsatzgebiete
- Nutz- und Sonderfahrzeuge: Steuerung von Kehrmaschinen, Kanalreinigungsfahrzeugen und Baumaschinen
- PKW: Motorsteuerung, ABS, Airbag, Infotainment
- Industrieautomation: Maschinensteuerung, Sensoranbindung
- Medizintechnik: Kommunikation zwischen medizinischen Geräten
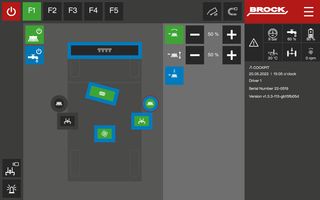
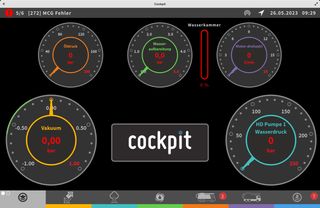
CAN-Bus in der HMI-Entwicklung
Bei der Entwicklung von HMIs für Fahrzeuge stellt der CAN-Bus die zentrale Datenquelle dar. Das HMI liest Sensordaten, Betriebszustände und Fehlercodes über den CAN-Bus aus und stellt sie dem Bediener visuell dar. Gleichzeitig können Steuerbefehle vom HMI über den Bus an Steuergeräte gesendet werden.
Varianten und Weiterentwicklungen
| Variante | Beschreibung |
|---|---|
| CAN 2.0A/B | Klassischer CAN mit 11-Bit- oder 29-Bit-Identifiern |
| CAN FD | Flexible Data Rate – höhere Datenraten und größere Nutzdaten |
| CANopen | Anwendungsschicht-Protokoll für Industrieautomation |
| J1939 | Standard für Nutzfahrzeuge und Landmaschinen |